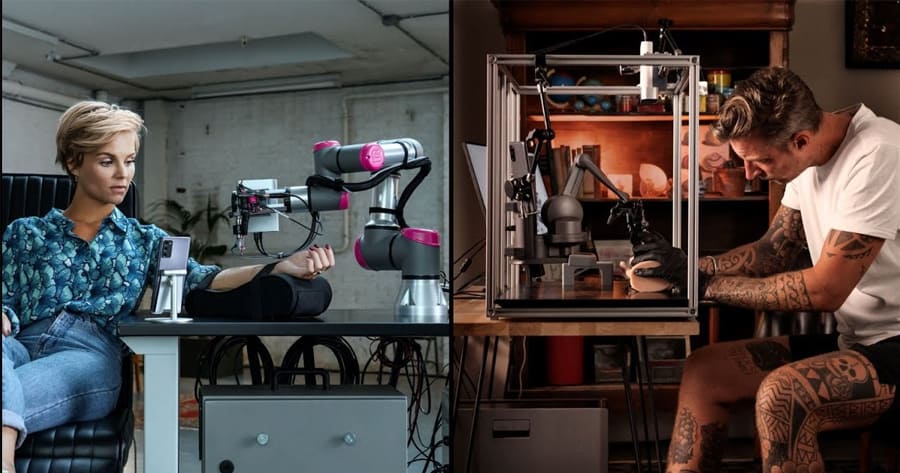

Impossible Tattoo เป็นแคมเปญการตลาด 5G เพื่อทดสอบทั้งความสามารถในการรับมือข้อมูลจำนวนมากๆ ให้ทำงานได้แบบไร้รอยต่อและทดสอบเรื่องความเร็ว ทาง T-Mobile Netherlands ร่วมมือกับ Noel Drew ผู้เชี่ยวชาญเทคโนโลยีจากลอนดอน และ Wes Thomas ช่างสัก เพื่อทดสอบการใช้หุ่นยนต์สักลายบนร่างกายมนุษย์
โปรเจคนี้มีชื่อว่า Impossible Tattoo โดยมอบหมายให้ Noel Drew สร้างระบบ machine learning ที่ขับเคลื่อนด้วย 5G ให้กับหุ่นยนต์เรียนรู้การสักจากช่างสัก Wes Thomas เพื่อลงเข็มและหมึกบนแขนจริงๆ ของ Stijn Fransen นักแสดงชาวดัตช์ โดยโปรเจคนี้ถือเป็นหุ่นยนต์ 5G Tattoo ตัวแรกของโลกเลยก็ว่าได้

Noel Drew กล่าวว่าเขาต้องการให้หุ่นยนต์มีลักษณะใกล้เคียงแขนของมนุษย์ที่เป็นช่างสักมากที่สุด โดยเน้นไปที่การเพิ่มข้อต่อ เขาจึงเลือกใช้ Robots UR3e เป็นพื้นฐานการพัฒนาหุ่นยนต์ช่างสัก เขากล่าวอีกว่า ความท้าทายของโปรเจคนี้คือ เขาอยากเห็นการทำงานแบบเรียลไทม์ และซิงค์กันระหว่างแขนหุ่นยนต์กับศิลปินช่างสักได้อย่างสมบูณณ์แบบที่สุด
ขั้นตอนการพัฒนาหุ่นยนต์ในโครงการนี้ ส่วนใหญ่เกิดขึ้นที่สตูดิโอในกรุงลอนดอนเป็นเวลานานประมาณ 6 สัปดาห์ โดยที่ Noel Drew เริ่มทำความเข้าใจการทำงานเชิงกลทั้งหมดของหุ่นยนต์ นอกจากนี้ เขายังต้องเรียนรู้และทำความเข้าใจขั้นตอนการสักจากช่างที่เป็นมนุษย์ด้วยในเวลาเดียวกัน
เขาสังเกตว่าก่อนจะเริ่มลงเข็ม ช่างสักต้องจุ่มเข็มลงในหมึกเหมือนกับการเขียนหนังสือแบบโบราณด้วยปากกาขนนก เขาจึงจำเป็นต้องเข้าใจกระบวนการทั้งหมดนี้ เพื่อปรับระบบส่งหมึกไปยังเข็มสักของหุ่นยนต์ให้ทำงานได้อย่างเหมาะสม เพื่อป้องกันไม่ให้เกิดข้อผิดพลาดเมื่อต้องลงเข็ม / ลงหมึกสักบนแขนของนักแสดง
แม้แต่ตัว Stijn Fransen ที่เป็นคนถูกสัก ต้องทำงานร่วมกับโปรเจคคั้งแต่เริ่มต้น ไปจนถึงการปรับเทียบค่าต่างๆ ของหุ่นยนต์เพื่อดูกระบวนการทำงานทั้งหมด รวมถึงทำความเข้าใจรายละเอียด ในแต่ละขั้นตอนด้วย

โปรเจค Impossible Tattoo เกิดขึ้นในช่วงล็อคดาวน์ ทำให้ Noel Drew นั้นต้องเป็นต้องคุยกับ Wes Thomas ที่เป็นช่างสักผ่านวิดีโอคอลเป็นหลัก แต่ท้ายสุด Wes Thomas จำเป็นต้องเดินทางมากรุงลอนดอนเพื่อร่วมงานกับทีมโปรเจคเป็นเวลา 2-3 วัน เผื่อผสมผสานการทำงานระหว่างการสักโดยมนุษย์ที่ทำอยู่ในปัจจุบันกับการใช้เทคโนโลยีหุ่นยนต์ช่วยในการสักลาย
ส่วนของ machine learning นั้น หุ่นยนต์จะเรียนรู้การเคลื่อนไหวจากช่างสักโดยใช้เครื่องมือที่ชื่อ Azure Kinect DK ติดตั้งเซ็นเซอร์เข้ากับเฟรมเหนือช่างสักเพื่อสแกนพื้นที่การทำงานของช่างสัก จากนั้นใช้อัลกอริทึมที่พัฒนาขึ้นเพื่อปรับแต่ง ร่างจุด และจดจำรูปแบบของการทำงานของช่างสัก
Noel Drew อธิบายเพิ่มเติมอีกว่า หุ่นยนต์จะเรียนรู้และจับการเคลื่อนไหวโดยใช้เทคนิคการติดตามด้วยแสง ซึ่งมีเครื่องมือต่างๆ ที่เข้ามาช่วย เช่น 3D Stylus และ Touch X จาก 3D Systems หุ่นยนต์จะเรียนรู้ตำแหน่ง ที่ปลายปากกา stylus สัมผัสซึ่งเหมือนกับตำแหน่งที่เข็มสัมผัสผิวหนังมนุษย์ จากนั้นระบบจะเริ่มเรียนรู้ในการต่อจุดต่าง ๆ แล้วแกะเป็นรูปทรงเรขาคณิตที่แบน แล้วส่งตำแหน่งที่พ็อตเป็นจุดต่างๆ ที่เป็น 2 มิติผ่าน 5G ไปยังหุ่นยนต์เพื่อประมวลผลจุดและตำแหน่งต่าง ๆ บนแขนของนางแบบที่ต้องลงเข็มสัก
ซอร์ฟแวร์ที่ทำงานร่วมกับหุ่นยนต์ในโปรเจคนี้ เป็นซอร์ฟแวร์โฮมเมดที่เขียนด้วยภาษา C++ ที่สแกนด้วยอุปกรณ์ Kinect โดย Seph Li ที่เป็น Media Artist & Creative Coder ที่อยู่ในกรุงลอนดอนเป็นผู้พัฒนาขึ้นทั้งหมด

Noel Drew สังเกตและเรียนรู้จาก Wes Thomas ว่าช่างสักจะใช้สัญชาตญาณในการสัมผัสระหว่างผิวหนังและเข็มที่มีหมึก การได้ทำงานกับ Wes ทำให้เขามีความเข้าใจมากขึ้นเรื่องผิวหนังของมนุษย์รวมถึงตำแหน่งต่างๆ บนร่างกายของมนุษย์
เรื่องความปลอดภัยเป็นปัจจัยหลักที่โปรเจคนี้คำนึงถึง มีการติดตั้งอุปกรณ์เซฟตี้เพื่อป้องกันการผิดพลาด ตั้งแต่ตัว software triggers การทำคู่มือความปลอดภัย และปุ่มหยุดฉุกเฉินที่ Noel Drew กับ Stijn Fransen ถือเอาไว้คนละอัน ในส่วนความปลอดภัยเชิงเทคนิค มีการนำโพเทนชิโอมิเตอร์ความแม่นยำสูงใช้ตรวจจับพื้นผิวหนังของแขนนางแบบและช่วยรักษาระดับความลึกของการลงเข็มเพื่อป้องกันไม่ให้เข็มลงลึกและแรงเกินไป
อย่างไรก็ตาม Noel Drew เน้นย้ำว่าการพัฒนาโปรเจค Impossible Tattoo นี้ ไม่ได้มีความพยายามที่จะแทนที่การสักลายแบบดั้งเดิมโดยมนุษย์ด้วยการใช้หุ่นยนต์
ที่มา : PCMAG